نسبت کاهش سرعت در چرخ دنده حلزونی
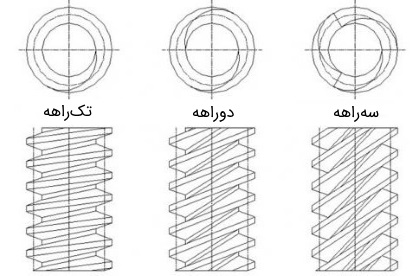
در بیشتر انواع چرخ دندهها، کاهش دنده به عنوان تابعی از قطر دو چرخ دنده درگیر تعریف میشود. اما در نوع حلزونی، این نسبت از روی تعداد راههای حلزون و تعداد دندانههای چرخ حلزون تعیین میشود. به شکل زیر توجه کنید. در حلزون تکراهه، هر دور کامل چرخیدن حلزون (360360 درجه)، چرخ دنده را به اندازه یک دندانه پیش میبرد. بنابراین، به عنوان مثال اگر تعداد دندانههای چرخ دنده، 2424 تا باشد، نسبت کاهش دنده برابر با 24:124:1 خواهد بود. نسبت کاهش دنده برای حلزونی که چند راه دارد، با تقسیم تعداد دندانههای چرخ حلزون به تعداد راههای حلزون تعریف میشود.
پارامترهای هندسی چرخ دنده حلزونی
پارامترهای هندسی چرخ دنده حلزونی در شکل زیر نشان داده شده است. معمولاً زاویه مارپیچ در حلزون و چرخ حلزون با یکدیگر تفاوت دارند. در بیشتر مواقع، زاویه مارپیچ روی حلزون، بزرگ و زاویه مارپیچ روی چرخ حلزون، کوچک است. زاویه پیشروی حلزون را با λλ و زاویه پیشروی چرخ حلزون را با ψGψG نشان میدهیم. همانطور که در شکل زیر مشاهده میکنید، این دو زاویه متمم هستند. برای مشخص کردن گام در مجموعه چرخ دنده حلزونی، گام محوری را با pxpx و گام دایرهای را با ptpt نشان میدهیم. اگر زاویه محور ۹۰ درجه باشد، این دو مقدار باهم برابرند. قطر گام در چرخ حلزون همانند چرخ دنده ساده و به صورت dG=NGptπdG=NGptπ محاسبه میشود.
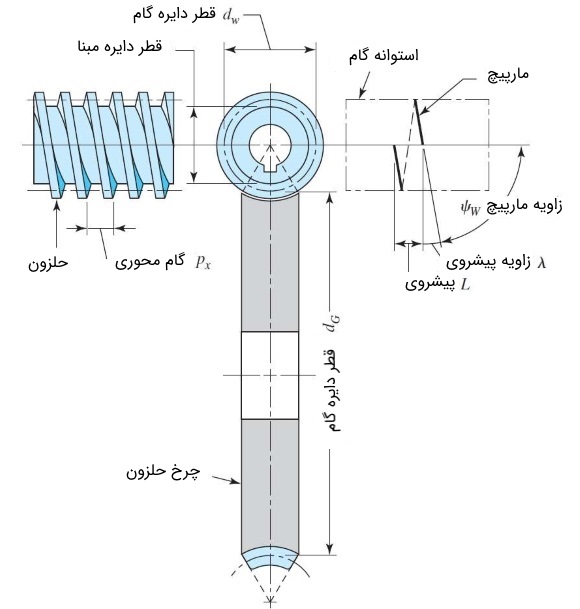
با دقت در شکل درمییابیم که قطر گام حلزون ارتباطی با تعداد دندانههای آن ندارد. به طور کلی، قطر گام حلزون در بازه C0.8753.0≤dW≤C0.8751.7C0.8753.0≤dW≤C0.8751.7 قرار میگیرد. پارامتر CC فاصله مرکزی است. در این حالت، ظرفیت اسب بخار چرخ دنده در حالت بهینه قرار میگیرد. پیشروی LL و زاویه پیشروی λλ را میتوان با استفاده از رابطههای زیر به هم تبدیل کرد.
L=pxNW, tanλ=LπdWL=pxNW, tanλ=LπdW
محاسبه نیروها در چرخ دنده حلزونی
شکل زیر را در نظر بگیرید. اگر از اصطکاک صرف نظر کنیم، تنها نیرویی که از چرخ حلزون به حلزون وارد میشود WW است. سه مولفه این نیرو در جهت محورهای مختصات نشان داده شده است. با کمک هندسه شکل، این سه مؤلفه را میتوان به صورت زیر استخراج کرد.
Wx=Wcosϕnsinλ Wy=Wsinϕn Wz=WcosϕncosλWx=Wcosϕnsinλ Wy=Wsinϕn Wz=Wcosϕncosλ

نیروهایی که به حلزون و چرخ حلزون وارد میشوند، به ترتیب با WW و GG نشان داده خواهند شد. مؤلفه WyWy، نیروی شعاعی است که به هر دو چرخ دنده وارد میشود. فرض میکنیم زاویه محور ۹۰ درجه است. در این حالت، نیروی مماسی حلزون WxWx است. همچنین مؤلفه WzWz هم نیروی مماسی وارد به حلزون و نیروی محوری وارد به چرخ حلزون را نشان میدهد. از آنجایی که نیروهای حلزون و چرخ حلزون در خلاف جهت هم وارد میشوند، رابطههای زیر را میتوان نوشت.
Wx=WWt=−WGa Wy=WWr=−WGr Wz=WWa=−WGtWx=WWt=−WGa Wy=WWr=−WGr Wz=WWa=−WGt
همانطور که مشاهده میکنید، محور چرخ حلزون با محور xx موازی است. محور حلزون هم در راستای محور zz قرار دارد. در بحث چرخ دندههای ساده حرکت یک دندانه نسبت به دندانهای که با آن جفت شده، از نوع غلتشی است. اما در اینجا، حرکت نسبی بین حلزون و چرخ حلزون، کاملاً از نوع لغزشی است. اصطکاک در چرخ دنده حلزونی نقش مهمی ایفا میکند و در عملکرد آن مؤثر است. مطابق شکل، هنگامی که نیروی WW عمود به پروفایل دندانه حلزون وارد میشود، نیروی اصطکاکی برابر با Wf=fWWf=fW ایجاد میشود. در نتیجه، مؤلفههای سهگانه نیروی W با در نظر گرفتن اصطکاک به شکل زیر خواهند بود.
Wx=W(cosϕnsinλ+fcosλ) Wy=Wsinϕn Wz=W(cosϕncosλ−fsinλ)Wx=W(cosϕnsinλ+fcosλ) Wy=Wsinϕn Wz=W(cosϕncosλ−fsinλ)
با جایگذاری −WGt−WGt به جای WzWz، میتوان WfWf را با کمک رابطه زیر محاسبه کرد.
Wf=fW=fWGtfsinλ−cosϕncosλWf=fW=fWGtfsinλ−cosϕncosλ
همچنین با مقایسه نیروهای محوری و شعاعی در هر دو چرخ دنده، رابطه زیر بین دو نیروی مماسی حلزون و چرخ حلزون برقرار میشود.
WWt=WGtcosϕnsinλ+fcosλfsinλ–cosϕncosλWWt=WGtcosϕnsinλ+fcosλfsinλ–cosϕncosλ
راندمان چرخ دنده حلزونی
راندمان چرخ دنده حلزونی به صورت نسبت نیروی مماسی وارد به حلزون در حالت بدون اصطکاک به نیروی مماسی وارد به حلزون در حالت با اصطکاک تعریف میشود. در حالت اول، f=0f=0 است. در نتیجه با توجه به رابطه قبل، راندمان چرخ دنده حلزونی به صورت زیر به دست میآید.
η=cosϕn−ftanλcosϕn+fcotλη=cosϕn−ftanλcosϕn+fcotλ
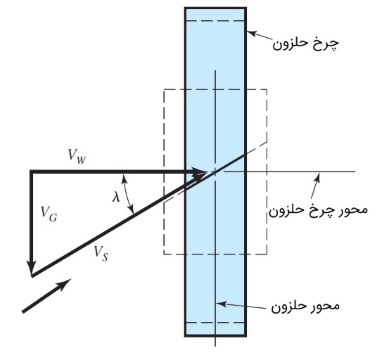
آزمایشات مختلف نشان داده است که ضریب اصطکاک به سرعت لغزشی یا نسبی بستگی دارد. سرعت خطی چرخ حلزون را با VGVG و سرعت خطی حلزون را با VWVW نشان میدهیم. در این حالت با توجه به شکل بالا، سرعت نسبی به این صورت قابل محاسبه است.
VW=VG+VS VS=VWcosλVW=VG+VS VS=VWcosλ
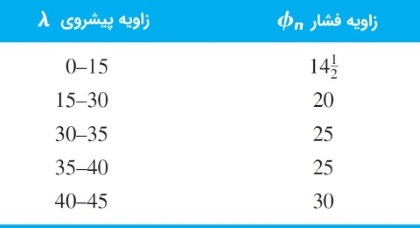
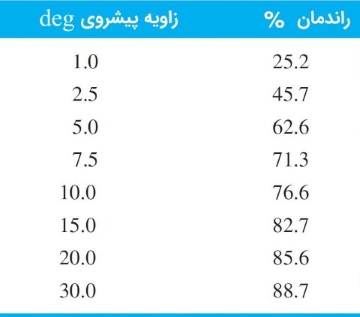
نسبت چرخ دنده حلزونی معمولاً بین 5:15:1 تا 75:175:1 تغییر میکند. در این حالت، راندمان نیز در بازه 50 تا ۹۰ درصد است. زاویههای پیشروی در حلزون و چرخ حلزون براساس جدول زیر طراحی میشوند.
اکنون اگر زاویه پیشروی حلزون را از ۱ تا ۳۰ درجه تغییر دهیم و ضریب اصطکاک را f=0.05f=0.05 فرض کنیم، میتوانیم راندمان چرخ دنده حلزونی را در این حالتها به دست آوریم. این نتایج در جدول زیر ارائه شده است.
مثال
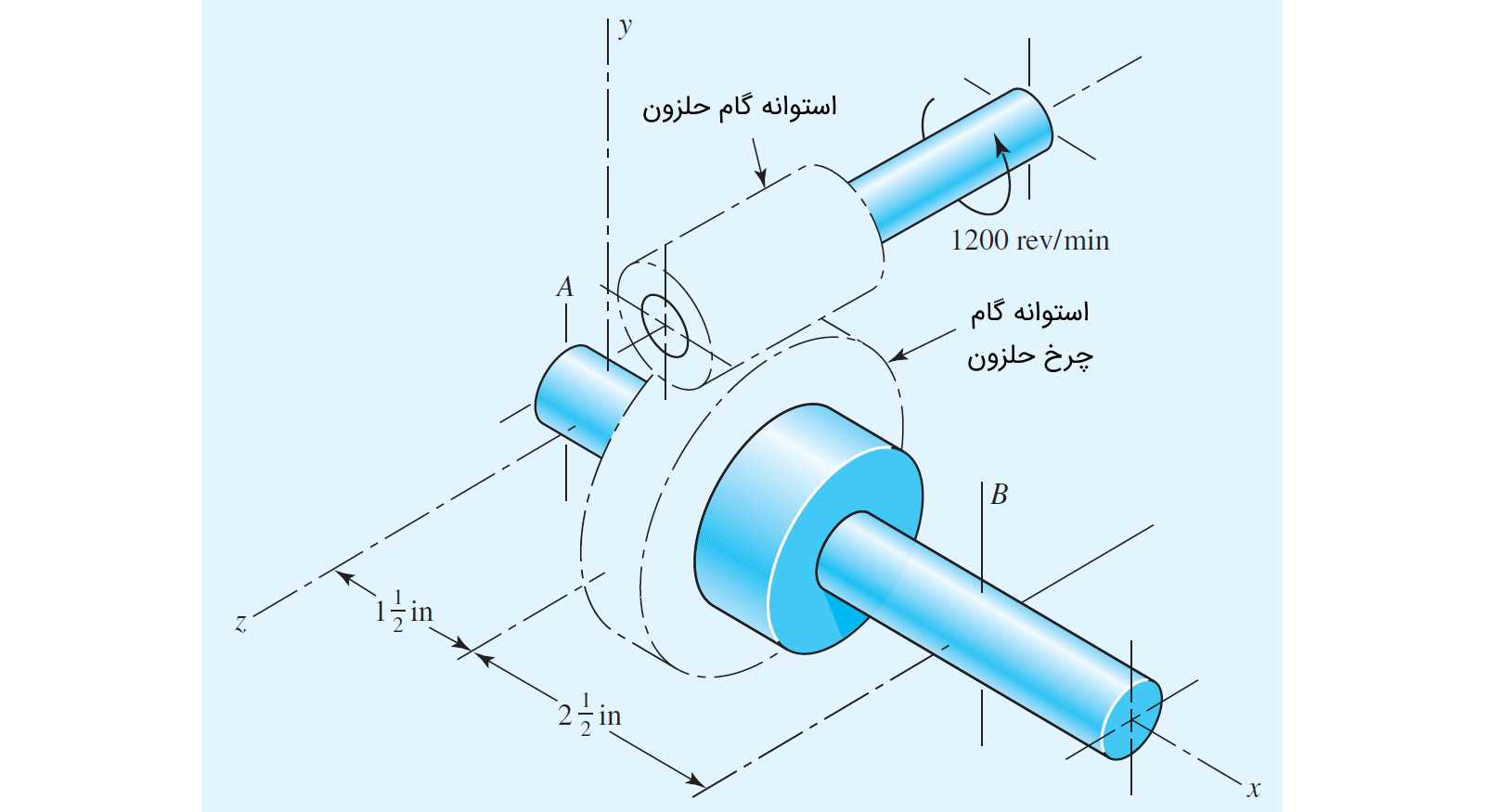
سؤال: چرخ حلزون نشان داده شده در شکل زیر، 3030 دندانه دارد. حلزونی راستگرد با 22 دندانه، توانی را برابر یک اسب بخار با سرعت 1200rev/min1200rev/min به چرخ حلزون منتقل میکند. گام قطری برای چرخ حلزون 66 و عرض دندانه آن 11 است. حلزون دارای قطر دایره گام 22 اینچ بوده و عرض دندانه آن هم 212212 اینچ است. زاویه فشار را 1412∘1412∘ فرض کنید. ضریب اصطکاک را برابر ۰/۰۳ در نظر بگیرید. الف) گام محوری، فاصله مرکزی، پیشروی و زاویه پیشروی را محاسبه کنید. ب) گشتاور و نیروهایی را که از طرف یاتاقانهای AA و BB به محور چرخ حلزون وارد میشود، به دست آورید.
پاسخ: الف) گام محوری مانند گام چرخ دنده، با کمک رابطه زیر محاسبه میشود.
px=pt=πP=π6=0.524inpx=pt=πP=π6=0.524in
پس از به دست آوردن قطر دایره گام چرخ دنده، فاصله مرکزی به شیوه زیر قابل محاسبه است.
dG=NGP=306=5in C=dW+dG2=2+52=3.5indG=NGP=306=5in C=dW+dG2=2+52=3.5in
برای یافتن مقادیر پیشروی و زاویه پیشروی، به طریق زیر عمل میکنیم.
L=pxNW=(0.524)(2)=1.048in λ=tan−1LπdW=tan−11.0482π=9.45∘L=pxNW=(0.524)(2)=1.048in λ=tan−1LπdW=tan−11.0482π=9.45∘
ب) میدانیم حلزون، راستگرد است. حال با توجه به قانون دست راست، با چرخش حلزون، سطح چرخ حلزون در جهت منفی zz به حرکت درخواهد آمد. بنابراین، چرخ حلزون نسبت به محور xx در جهت عقربههای ساعت میچرخد. حال، سرعت خطی حلزون را محاسبه میکنیم.
VW=πdWnW12=π(2)(1200)12=628ft/minVW=πdWnW12=π(2)(1200)12=628ft/min
سرعت چرخ حلزون برابر با nG=(230)×1200=80rev/minnG=(230)×1200=80rev/min است. بنابراین، سرعت خطی چرخ حلزون به صورت زیر به دست میآید.
VG=πdGnG12=π(5)(80)12=102ft/minVG=πdGnG12=π(5)(80)12=102ft/min
اکنون میتوانیم با داشتن سرعت خطی حلزون و چرخ حلزون، سرعت لغزشی را بیابیم.
VS=VWcosλ=628cos9.46∘=637ft/minVS=VWcosλ=628cos9.46∘=637ft/min
نیروی مماسی وارد به حلزون، به راحتی و با استفاده از توان اسب بخار و سرعت خطی حلزون، قابل محاسبه خواهد بود. (این رابطه قبلاً در مقاله مربوط به چرخ دنده ساده معرفی شده است.)
WWt=33,000×HVW=33,000×1628=52.5lbfWWt=33,000×HVW=33,000×1628=52.5lbf
این نیرو در خلاف جهت محور xx وارد میشود. حال با داشتن ضریب اصطکاک، میتوانیم برآیند نیروی WW را به دست آوریم.
W=Wxcosϕnsinλ+fcosλ =52.5cos14.5∘×sin9.46∘+0.03×cos9.46∘=278lbfW=Wxcosϕnsinλ+fcosλ =52.5cos14.5∘×sin9.46∘+0.03×cos9.46∘=278lbf
اکنون مؤلفههای WW در جهت yy و zz به راحتی محاسبه میشوند.
Wy=Wsinϕn=278sin14.5∘=69.6lbf Wz=W(cosϕncosλ−fsinλ) =278(cos14.5∘×cos9.46∘+0.03×sin9.46∘)=264lbf ⇒⎧⎨⎩WGa=−Wx=52.5lbfWGr=−Wy=−69.6lbfWGt=−Wz=−264lbfWy=Wsinϕn=278sin14.5∘=69.6lbf Wz=W(cosϕncosλ−fsinλ) =278(cos14.5∘×cos9.46∘+0.03×sin9.46∘)=264lbf ⇒{WGa=−Wx=52.5lbfWGr=−Wy=−69.6lbfWGt=−Wz=−264lbf
نمودار جسم آزاد برای این مجموعه چرخ دنده، مطابق زیر رسم شده است.
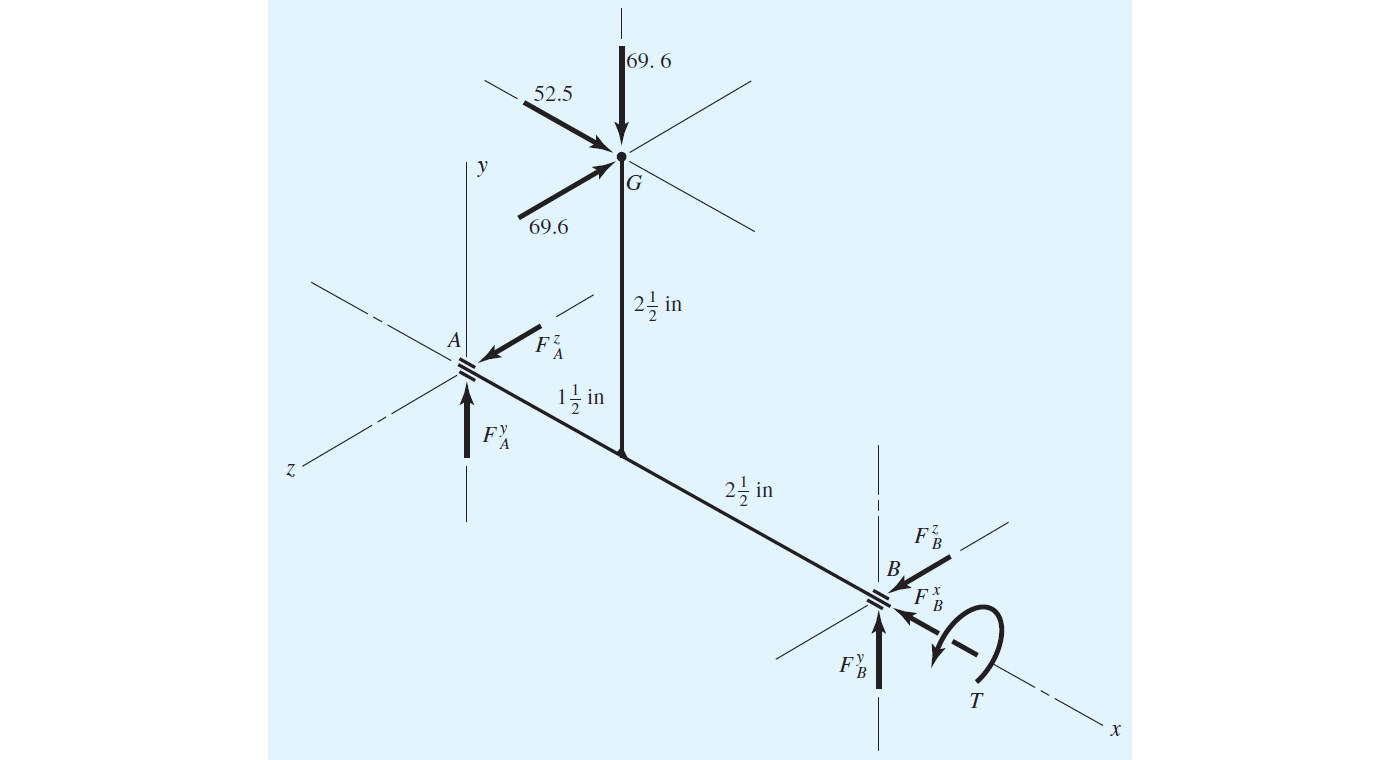
با نوشتن برآیند نیروها در راستای محور xx، مقدار FxB=−52.5lbfFBx=−52.5lbf به دست میآید. در ادامه، برآیند گشتاور حول محور zz را مینویسیم.
−(52.5)(2.5)–(69.6)(1.5)+4×FyB=0 ⇒FyB=58.9lbf−(52.5)(2.5)–(69.6)(1.5)+4×FBy=0 ⇒FBy=58.9lbf
برآیند گشتاور حول محور yy را نوشته و برابر صفر قرار میدهیم.
(264)(1.5)–4×FzB=0 ⇒ FzB=99lbf(264)(1.5)–4×FBz=0 ⇒ FBz=99lbf
اکنون میتوانیم تعادل نیروها را در جهت yy و zz بنویسیم.
−69.6+58.9+FyA=0 ⇒ FyA=10.7lbf −264+99+FzA=0 ⇒ FzA=165lbf−69.6+58.9+FAy=0 ⇒ FAy=10.7lbf −264+99+FAz=0 ⇒ FAz=165lbf
در نهایت، گشتاور با کمک رابطه زیر به دست میآید.
−(264)(2.5)+T=0 ⇒ T=660lbf.in−(264)(2.5)+T=0 ⇒ T=660lbf.in
به دلیل وجود اصطکاک، گشتاور محاسبه شده، از حاصلضرب نسبت چرخ دنده در گشتاور ورودی کمتر است.
در صورت علاقهمندی به مباحث مرتبط در زمینه مهندسی مکانیک، آموزشهای زیر نیز پیشنهاد میشوند:
 با سلام
با سلام